In this tutorial created with Colab online tool I used HTML and JavaScript source code.
The tutorial is easy to understand and use it.
You can see all my examples of my GitHub repo.
Sunday, December 6, 2020
Thursday, December 3, 2020
Python 3.6.9 : My colab tutorials - part 009.
I update may colab work and I add new notebooks.
You can see all of these on my GitHub account.
These are examples:
You can see all of these on my GitHub account.
These are examples:
- catafest_009.ipynb - show you how to use %% colab features;
- catafest_010.ipynb - example with Detectron2 is Facebook AI Research's with state-of-the-art object detection algorithms;
- catafest_011.ipynb - test a sound classification with YAMNet from a web example - not very happy with the result;
Sunday, November 22, 2020
Python 3.9.0 : Physics simulation with PyBullet .
I took a look at the documentation of this python packet to give you a brief introduction:
PyBullet is a fast and easy to use Python module for robotics simulation and machine learning, with a focus on sim-to-real transfer. With PyBullet you can load articulated bodies from URDF, SDF, MJCF and other file formats. PyBullet provides forward dynamics simulation, inverse dynamics computation, forward and inverse kinematics, collision detection and ray intersection queries. The Bullet Physics SDK includes PyBullet robotic examples such as a simulated Minitaur quadruped, humanoids running using TensorFlow inference and KUKA arms grasping objects.
...
PyBullet can be easily used with TensorFlow and OpenAI Gym.
...
The GUI connection will create a new graphical user interface (GUI) with 3D OpenGL rendering, within the same process space as PyBullet. On Linux and Windows this GUI runs in a separate thread, while on OSX it runs in the same thread due to operating system limitations.
...
For UDP networking, there is a App_PhysicsServerUDP that listens to a certain UDP port.
...
By default, there is no gravitational force enabled. setGravity lets you set the default gravity force for all objects. The loadURDF will send a command to the physics server to load a physics model from a Universal Robot Description File (URDF). The URDF file is used by the ROS project (Robot Operating System) to describe robots and other objects, it was created by the WillowGarage and the Open Source Robotics Foundation (OSRF).
I tested with Fedora 33 and Python version 3.9.0.
The first step was installation.
It can be seen that in the cycle for which I have the simulation for 10000 steps of time.
A smaller number will quickly interrupt the simulation.
You can create your own URDF files because they are formatted in XML format.
A good area for learning is this webpage.
PyBullet is a fast and easy to use Python module for robotics simulation and machine learning, with a focus on sim-to-real transfer. With PyBullet you can load articulated bodies from URDF, SDF, MJCF and other file formats. PyBullet provides forward dynamics simulation, inverse dynamics computation, forward and inverse kinematics, collision detection and ray intersection queries. The Bullet Physics SDK includes PyBullet robotic examples such as a simulated Minitaur quadruped, humanoids running using TensorFlow inference and KUKA arms grasping objects.
...
PyBullet can be easily used with TensorFlow and OpenAI Gym.
...
The GUI connection will create a new graphical user interface (GUI) with 3D OpenGL rendering, within the same process space as PyBullet. On Linux and Windows this GUI runs in a separate thread, while on OSX it runs in the same thread due to operating system limitations.
...
For UDP networking, there is a App_PhysicsServerUDP that listens to a certain UDP port.
...
By default, there is no gravitational force enabled. setGravity lets you set the default gravity force for all objects. The loadURDF will send a command to the physics server to load a physics model from a Universal Robot Description File (URDF). The URDF file is used by the ROS project (Robot Operating System) to describe robots and other objects, it was created by the WillowGarage and the Open Source Robotics Foundation (OSRF).
I tested with Fedora 33 and Python version 3.9.0.
The first step was installation.
[mythcat@desk ~]$ pip3 install pybullet --upgrade --user
Collecting pybullet
Downloading pybullet-3.0.6.tar.gz (89.8 MB)
|████████████████████████████████| 89.8 MB 51 kB/s
Using legacy 'setup.py install' for pybullet, since package 'wheel' is not installed.
Installing collected packages: pybullet
Running setup.py install for pybullet ... done
Successfully installed pybullet-3.0.6import pybullet as p
# Can alternatively pass in p.DIRECT
client = p.connect(p.GUI)
p.setGravity(0, 0, -10, physicsClientId=client)
import pybullet_data
p.setAdditionalSearchPath(pybullet_data.getDataPath())
planeId = p.loadURDF("plane.urdf")
my_racecar = p.loadURDF("racecar/racecar.urdf", basePosition=[0,0,0.2])
position, orientation = p.getBasePositionAndOrientation(my_racecar)
for _ in range(10000):
p.stepSimulation()It can be seen that in the cycle for which I have the simulation for 10000 steps of time.
A smaller number will quickly interrupt the simulation.
You can create your own URDF files because they are formatted in XML format.
A good area for learning is this webpage.
Saturday, October 31, 2020
Python 3.9.0 : Testing twisted python module - part 001 .
Today I tested two python modules named: twisted and twisted[tls].
Twisted is an event-driven network programming framework written in Python and licensed under the MIT License. Twisted projects variously support TCP, UDP, SSL/TLS, IP multicast, Unix domain sockets, many protocols (including HTTP, XMPP, NNTP, IMAP, SSH, IRC, FTP, and others), and much more. Twisted is based on the event-driven programming paradigm, which means that users of Twisted write short callbacks which are called by the framework., see wikipedia webpage.
In this tutorial I will show you only some of these tests and how you can work with these python modules.
About twisted you can read more at the official webpage. In Fedora distro version 33 you can use the dnf tool to search for and install these python packages.
The default factory class twisted.internet.protocol.Factory just instantiates each Protocol and lets every Protocol access, and possibly modify, the persistent configuration.
This protocol responds to the initial connection with a well known quote, and then terminates the connection.
The protocol never waits for an event because handles data in an asynchronous manner.
The reactor interface lets many different loops handle the networking code.
The source code have two classes each is used to show a simple echo client on port 8080 - you can use any port.
This source code is the most simple example to understand the relation between factory , protocol and reactor.
The result is this:
Twisted is an event-driven network programming framework written in Python and licensed under the MIT License. Twisted projects variously support TCP, UDP, SSL/TLS, IP multicast, Unix domain sockets, many protocols (including HTTP, XMPP, NNTP, IMAP, SSH, IRC, FTP, and others), and much more. Twisted is based on the event-driven programming paradigm, which means that users of Twisted write short callbacks which are called by the framework., see wikipedia webpage.
In this tutorial I will show you only some of these tests and how you can work with these python modules.
About twisted you can read more at the official webpage. In Fedora distro version 33 you can use the dnf tool to search for and install these python packages.
[root@desk mythcat]# dnf search twisted
...
python3-twisted.x86_64 : Twisted is a networking engine written in Python
python3-twisted+tls.x86_64 : Metapackage for python3-twisted: tls extras[mythcat@desk ~]$ cd PythonProjects/
[mythcat@desk PythonProjects]$ pip3 install twisted
...
[mythcat@desk PythonProjects]$ pip3 install twisted[tls]
...[mythcat@desk PythonProjects]$ python3.9
Python 3.9.0 (default, Oct 6 2020, 00:00:00)
[GCC 10.2.1 20200826 (Red Hat 10.2.1-3)] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> from twisted.protocols import basicfrom twisted.internet import reactor, protocol
class ClientEcho(protocol.Protocol):
def connectionMade(self):
self.transport.write("Hello, world!".encode('utf-8'))
def dataReceived(self, data):
print ("Server: ", data)
self.transport.loseConnection()
class FactoryEcho(protocol.ClientFactory):
def buildProtocol(self, addr):
return ClientEcho()
def clientConnectionFailed(self, connector, reason):
print ("Connection failed")
reactor.stop()
def clientConnectionLost(self, connector, reason):
print ("Connection lost")
reactor.stop()
reactor.connectTCP("localhost", 8080, FactoryEcho())
reactor.run()The default factory class twisted.internet.protocol.Factory just instantiates each Protocol and lets every Protocol access, and possibly modify, the persistent configuration.
This protocol responds to the initial connection with a well known quote, and then terminates the connection.
The protocol never waits for an event because handles data in an asynchronous manner.
The reactor interface lets many different loops handle the networking code.
The source code have two classes each is used to show a simple echo client on port 8080 - you can use any port.
This source code is the most simple example to understand the relation between factory , protocol and reactor.
The result is this:
[mythcat@desk PythonProjects]$ python3.9 echo_client_001.py
Server: b'Hello, world!'
Connection lostSaturday, October 10, 2020
Python 3.9.0 : Union and in-place union operators
Python introduces two new operators for dictionaries named union used in code with pipe operator | and in-place union used in python code with this |=.
I this tutorial I will show you how can be used:[mythcat@desk ~]$ python3.9
Python 3.9.0 (default, Oct 6 2020, 00:00:00)
[GCC 10.2.1 20200723 (Red Hat 10.2.1-1)] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> step_one = {"worker_one":"task_one", "worker_two":"task_two"}
>>> step_two = {"worker_three":"task_one", "worker_fouw":"task_two"}
>>> merged_step_one_step_two = {**step_one, **step_two}
>>> empty = {}
>>> empty |= step_one
>>> empty
{'worker_one': 'task_one', 'worker_two': 'task_two'}
>>> step_one
{'worker_one': 'task_one', 'worker_two': 'task_two'}
>>> step_two
{'worker_three': 'task_one', 'worker_fouw': 'task_two'}
>>> all = step_one | step_two
>>> all
{'worker_one': 'task_one', 'worker_two': 'task_two', 'worker_three': 'task_one', 'worker_fouw': 'task_two'}
>>> copy_step_one = empty | step_one
>>> copy_step_one
{'worker_one': 'task_one', 'worker_two': 'task_two'}
>>> copy_step_one |= [("manager", "steps")]
>>> copy_step_one
{'worker_one': 'task_one', 'worker_two': 'task_two', 'manager': 'steps'}
>>> numbers = {0: "zero", 1: "one"}
>>> numbers_one = {0: "zero", 1: "one"}
>>> numbers_two = {0: "zero", 2: "two"}
>>> numbers_one | numbers_two
{0: 'zero', 1: 'one', 2: 'two'}
>>> numbers_two | numbers_one
{0: 'zero', 2: 'two', 1: 'one'}
>>> numbers_three = {0: 'zero', 11: 'error 1', 22: 'error 2', 33:'error 3'}
>>> numbers_three | numbers_one
{0: 'zero', 11: 'error 1', 22: 'error 2', 33: 'error 3', 1: 'one'}
>>> numbers_one | numbers_three
{0: 'zero', 1: 'one', 11: 'error 1', 22: 'error 2', 33: 'error 3'}Python 3.9.0 : Introduction to release 3.9.0.
This is a short introduction to release 3.9.0.
Five days ago, a new release of version 3.9 appeared with a series of improvements and new python packages, see the official website.
You can install easily on Fedora 32 with dnf tool.
[root@desk mythcat]# dnf install python39.x86_64
...
Installing:
python39 x86_64 3.9.0-1.fc32
...
Installed:
python39-3.9.0-1.fc32.x86_64
Complete!You can run easily with this command;
[root@desk mythcat]# python3.9
Python 3.9.0 (default, Oct 6 2020, 00:00:00)
[GCC 10.2.1 20200723 (Red Hat 10.2.1-1)] on linux
Type "help", "copyright", "credits" or "license" for more information. [root@desk mythcat]# python3.9-x86_64-config --libs
-lcrypt -lpthread -ldl -lutil -lm -lm [mythcat@desk ~]$ python3.9 -X oldparser my_script_name.py
...For example including one accessing items in a dictionary, like this simple example:
buttons = {
"hello": QPushButton("hello word!"),
"bye": QPushButton("bye word!"),
"buy": QPushButton("buy!!"),
}
...
@buttons["hello"].clicked.connect
def speak_hello():
... In this case, the zoneinfo module provides a concrete time zone implementation to support the IANA time zone database.
This support contains code and data that represent the history of local time for many representative locations around the globe.
Many features for math, strings, union operator for the dictionary, HTTP codes, and more.
Completion of variable and module names is automatically enabled at interpreter startup so that the Tab key invokes the completion function.
You can see a simple example with zoneinfo python module and completion feature.
[mythcat@desk ~]$ python3.9
Python 3.9.0 (default, Oct 6 2020, 00:00:00)
[GCC 10.2.1 20200723 (Red Hat 10.2.1-1)] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> from zoneinfo import ZoneInfo
>>> import zoneinfo
>>> zoneinfo.available_timezones()
{'Hongkong', 'America/Iqaluit', 'America/Indianapolis', 'America/Louisville', 'America/New_York',
'America/Mazatlan', 'Australia/Yancowinna', 'Africa/Ndjamena', 'Portugal', 'Africa/Bujumbura',
'America/Rosario', 'America/Antigua','America/Indiana/Tell_City', 'America/Managua',
'Europe/Paris', 'Europe/Oslo',
...
>>> tz = ZoneInfo("Europe/Bucharest")
>>> tz.
tz.clear_cache( tz.from_file( tz.key tz.tzname(
tz.dst( tz.fromutc( tz.no_cache( tz.utcoffset(
>>> tz. [mythcat@desk ~]$ python var_access_benchmark.py
Variable and attribute read access:
6.0 ns read_local
6.5 ns read_nonlocal
10.7 ns read_global
10.7 ns read_builtin
25.2 ns read_classvar_from_class
23.4 ns read_classvar_from_instance
34.3 ns read_instancevar
29.4 ns read_instancevar_slots
26.8 ns read_namedtuple
42.4 ns read_boundmethod
Variable and attribute write access:
6.6 ns write_local
7.0 ns write_nonlocal
23.3 ns write_global
54.1 ns write_classvar
46.4 ns write_instancevar
39.4 ns write_instancevar_slots
Data structure read access:
26.1 ns read_list
28.1 ns read_deque
27.5 ns read_dict
25.8 ns read_strdict
Data structure write access:
29.6 ns write_list
31.7 ns write_deque
34.4 ns write_dict
31.7 ns write_strdict
Stack (or queue) operations:
55.5 ns list_append_pop
49.7 ns deque_append_pop
51.0 ns deque_append_popleft
Timing loop overhead:
0.4 ns loop_overheadTuesday, September 29, 2020
Python Qt5 : Use QStandardItem with Images.
This tutorial show you how to use QStandardItem with Images.
The source code is simple to understand.
import sys
from PyQt5.QtWidgets import QApplication, QMainWindow, QTreeView
from PyQt5.QtCore import Qt
from PyQt5.QtGui import QFont, QColor, QImage, QStandardItemModel, QStandardItem
class ItemImage(QStandardItem):
def __init__(self, txt='', image_path='', set_bold=False, color=QColor(0, 0, 0)):
super().__init__()
self.setEditable(False)
self.setForeground(color)
self.setText(txt)
if image_path:
image = QImage(image_path)
self.setData(image, Qt.DecorationRole)
class MyApp(QMainWindow):
def __init__(self):
super().__init__()
self.resize(1200, 1200)
treeView = QTreeView()
treeView.setHeaderHidden(True)
treeView.header().setStretchLastSection(True)
treeModel = QStandardItemModel()
rootNode = treeModel.invisibleRootItem()
robots = ItemImage('Robots', '', set_bold=True)
aaa = ItemImage('aaa.jpg', 'aaa.jpg', 14)
robots.appendRow(aaa)
bbb = ItemImage('bbb.jpg', 'bbb.jpg', 16)
robots.appendRow(bbb)
robots2 = ItemImage('Robots 2', '', set_bold=False)
aaa = ItemImage('ccc.png', 'ccc.png', 14)
robots2.appendRow(aaa)
bbb = ItemImage('ddd.jpg', 'ddd.jpg', 16)
robots2.appendRow(bbb)
rootNode.appendRow(robots)
rootNode.appendRow(robots2)
treeView.setModel(treeModel)
treeView.expandAll()
self.setCentralWidget(treeView)
app = QApplication(sys.argv)
demo = MyApp()
demo.show()
sys.exit(app.exec_())The result is this:

Monday, September 21, 2020
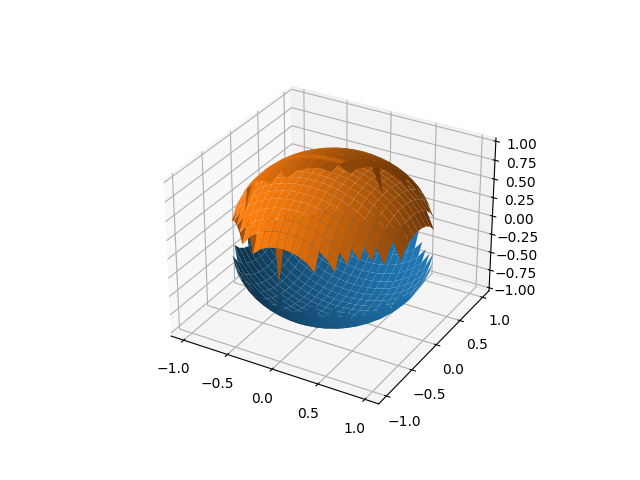
Python 3.8.5 : A sphere in Cartesian coordinates - part 001.
I like the equation of a sphere of radius R centered at the origin is given in Cartesian coordinates:
x*x + y*y + z*z = r*r
It is one of the first elements that helped me better understand mathematics and later the dynamics and theory of electromagnetic fields.
I did not find a graphical representation using python as accurately as possible without eliminating the discretion of the range from -1 and 1 and radius * radius = 1.
The main reason is the plot_surface from matplotlib python package.
This is output of my script:
[mythcat@desk ~]$ python sphere_xyz.py
[-1. -0.91666667 -0.83333333 -0.75 -0.66666667 -0.58333333
-0.5 -0.41666667 -0.33333333 -0.25 -0.16666667 -0.08333333
0. 0.08333333 0.16666667 0.25 0.33333333 0.41666667
0.5 0.58333333 0.66666667 0.75 0.83333333 0.91666667
1. ]
sphere_xyz.py:7: RuntimeWarning: invalid value encountered in sqrt
return np.sqrt(1-x**2 - y**2)
sphere_xyz.py:18: UserWarning: Z contains NaN values. This may result in rendering artifacts.
surface1 = ax.plot_surface(X2, Y2, -Z2,rstride=1, cstride=1, linewidth=0,antialiased=True)
sphere_xyz.py:19: UserWarning: Z contains NaN values. This may result in rendering artifacts.
surface2 = ax.plot_surface(X2, Y2, Z2,rstride=1, cstride=1, linewidth=0,antialiased=True)The image result is this:
The source code is this:
import matplotlib.pyplot as plt
import numpy as np
from matplotlib.colors import LightSource
#@np.vectorize
def solve_Z2(x,y):
return np.sqrt(1-x**2 - y**2)
fig = plt.figure()
ax = fig.gca(projection='3d')
xrange2 = np.linspace(-1.0, 1.0, 25)
yrange2 = np.linspace(-1.0, 1.0, 25)
print(xrange2)
X2, Y2 = np.meshgrid(xrange2, yrange2)
Z2 = solve_Z2(X2, Y2)
surface1 = ax.plot_surface(X2, Y2, -Z2,rstride=1, cstride=1, linewidth=0,antialiased=True)
surface2 = ax.plot_surface(X2, Y2, Z2,rstride=1, cstride=1, linewidth=0,antialiased=True)
plt.show()Saturday, September 19, 2020
Python 3.8.5 : Linked List - part 001.
In computer science, a linked list is a linear collection of data elements whose order is not given by their physical placement in memory. see wikipedia.org.
In this tutorial I will show you how these linked list works and how can build with python programming language.Let's start with some basic elements:
- Linked List is a linear data structure;
- Linked List are not array;
- Linked List are not stored at a contiguous location because use pointes;
- Each element use a linked pointe;
- Linked List has a dynamic size;
- Linked List use operations like insertion and deletion for each element;
- The access to elements is sequentially;
- Using reference to pointer foe each element needs extra memory space and is not cache friendly;
The Linked List consists of at least two parts: data and pointer to the next node.
The first element of the list is called the head.
The last node has a reference to null.
The each element named node of the list has a similar structure like Linked List: data node and pointer to the next node.
The data from Linked list is represent like a sequence.
A number of operations are required to use the Linked List.
The basic operations supported by a list can be:
- insertion - adds an element at the beginning of the list;
- deletion - deletes an element at the beginning of the list;
- display - displays the complete list;
- search - searches an element using the given key;
- delete - deletes an element using the given key.
The Advantages of Linked List elements can be easily inserted or removed without reallocation or reorganization of the entire structure because the data items need not be stored contiguously in memory or on disk using operations.
The Linked List structure allows several ways to link nodes resulting in a number of types of Linked List:- Simple linked list;
- Doubly linked list;
- Multiply linked list;
- Circular linked list;
- Sentinel nodes;
- Empty lists;
- Hash linking;
- List handles;
- Combining alternatives;
Let's start with first source code for the first type of Linked List named Simple linked list.
Python 3.8.5 (default, Aug 12 2020, 00:00:00)
[GCC 10.2.1 20200723 (Red Hat 10.2.1-1)] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> # create a node class
>>> class Node:
... # first initialise of the node object
... def __init__(self, data):
... # assign the node data
... self.data = data
... # initialize next element as null
... self.next = None
...
>>> # create a simple linked list
>>> class Simple_LinkedList:
... # first initialize of element named head
... def __init__(self):
... self.head = None
>>> # use the list
>>> if __name__=='__main__':
... simple_list = Simple_LinkedList()
... simple_list.head = Node(1)
... second = Node(2)
... third = Node(3)
... #link first node with the second
... simple_list.head.next = second
... #link second node with the third
... second.next = third
... # now the list is linked as a simple Linked ListThis source code don't include any basic operations.
If you put this source code into python script and run it you will see this:
[mythcat@desk ~]$ python simple_LinkedList.py
<__main__.Node object at 0x7f35163e1ac0>
<__main__.Node object at 0x7f351638b0a0>
<__main__.Node object at 0x7f351638b130>I create a basic operation for this simple Linked List to display the content of this list:
# create a simple linked list with a basic diplay operation
class Simple_LinkedList:
# first initialize of element named head
def __init__(self):
self.head = None
# use the basic operation for display
def display_Simple_LinkedList(self):
points_to_node = self.head
#will traverse the list to the last node.
while (points_to_node):
# print data linked to points_to_node
print (points_to_node.data)
# print next node linked to points_to_node
points_to_node = points_to_node.nextI run with this new python source code and result is this:
[mythcat@desk ~]$ python simple_LinkedList_basic_display.py
1
2
3 Thursday, September 10, 2020
Python 3.8.5 : Get Sentinel-3 satellite data from Eutelsat.
The tutorial for today is about Eutelsat satellites.
I used Sentinel-3 with these features:
You need to install xarray and netcdf4 python packages:

After I download the nc file with all data I used this source code:
I used Sentinel-3 with these features:
- Instrument: SLSTR;
- Mode: EO;
- Satellite: Sentinel-3
You need to install xarray and netcdf4 python packages:
[mythcat@desk TLauncher]$ pip install xarray
...
[mythcat@desk ~]$ pip install netcdf4
Defaulting to user installation because normal site-packages is not writeable
Collecting netcdf4
Downloading netCDF4-1.5.4-cp38-cp38-manylinux1_x86_64.whl (4.3 MB)
|████████████████████████████████| 4.3 MB 649 kB/s
Collecting cftime
Downloading cftime-1.2.1-cp38-cp38-manylinux1_x86_64.whl (271 kB)
|████████████████████████████████| 271 kB 30.5 MB/s
Requirement already satisfied: numpy>=1.9 in /usr/lib64/python3.8/site-packages (from netcdf4) (1.18.4)
Installing collected packages: cftime, netcdf4
Successfully installed cftime-1.2.1 netcdf4-1.5.4 After I download the nc file with all data I used this source code:
Python 3.8.5 (default, Aug 12 2020, 00:00:00)
[GCC 10.2.1 20200723 (Red Hat 10.2.1-1)] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import xarray as xr
>>> dir = '/home/mythcat/Downloads/'
>>> file_xr = xr.open_dataset(dir+'FRP_in.nc')
>>> file_xr
<xarray .dataset="">
Dimensions: (columns: 1500, fires: 23, rows: 2000)
Dimensions without coordinates: columns, fires, rows
Data variables:
i (fires) int16 ...
j (fires) int32 ...
time (fires) datetime64[ns] ...
latitude (fires) float64 ...
longitude (fires) float64 ...
FRP_MWIR (fires) float64 ...
FRP_uncertainty_MWIR (fires) float64 ...
transmittance_MWIR (fires) float64 ...
FRP_SWIR (fires) float64 ...
FRP_uncertainty_SWIR (fires) float64 ...
FLAG_SWIR_SAA (fires) int16 ...
transmittance_SWIR (fires) float64 ...
confidence (fires) float64 ...
classification (fires) uint8 ...
S7_Fire_pixel_radiance (fires) float32 ...
F1_Fire_pixel_radiance (fires) float32 ...
used_channel (fires) uint8 ...
Radiance_window (fires) float32 ...
Glint_angle (fires) float64 ...
IFOV_area (fires) float64 ...
TCWV (fires) float64 ...
n_window (fires) int16 ...
n_water (fires) int16 ...
n_cloud (fires) int16 ...
n_SWIR_fire (fires) float32 ...
flags (rows, columns) uint32 ...
Attributes:
title: SLSTR Level 2 Product, Fire Radiative Power measu...
comment:
netCDF_version: 4.2 of Jul 5 2012 17:07:43 $
product_name: S3B_SL_2_FRP____20200910T082906_20200910T083406_2...
institution: MAR
source: IPF-SL-2-FRP 02.00
history:
references: S3MPC ACR FRP 003 - i1r2 - SLSTR L2 Product Data ...
contact: ops@eumetsat.int
creation_time: 2020-09-10T10:38:54Z
resolution: [ 1000 1000 ]
absolute_orbit_number: 12385
start_time: 2020-09-10T08:29:06.288252Z
stop_time: 2020-09-10T08:34:06.277355Z
track_offset: 998
start_offset: 14032
>>> lat = file_xr['latitude']
>>> long = file_xr['longitude']
>>> lat , long
(<xarray.DataArray 'latitude' (fires: 23)>
array([52.992509, 52.98967 , 48.447335, 44.00415 , 48.443263, 48.439204,
48.438141, 48.434069, 48.430012, 48.430012, 43.99905 , 43.993966,
43.996166, 43.991064, 43.991064, 43.985972, 43.986568, 43.981467,
43.976379, 43.978613, 43.973495, 43.973495, 43.968419])
Dimensions without coordinates: fires
Attributes:
long_name: Latitude
standard_name: latitude
units: degrees_north
valid_min: -90.0
valid_max: 90.0,
array([38.424813, 38.441404, 29.594317, 26.774829, 29.607258, 29.620235,
29.592402, 29.605285, 29.618236, 29.618236, 26.787083, 26.799272,
26.77044 , 26.782656, 26.782656, 26.7949 , 26.769496, 26.781764,
26.794036, 26.765122, 26.777358, 26.777358, 26.789596])
Dimensions without coordinates: fires
Attributes:
long_name: Longitude
standard_name: longitude
units: degrees_east
valid_min: -180.0
valid_max: 180.0) >>> FRP_SWIR = file_xr['FRP_SWIR']
>>> FRP_SWIR
array([-1., -1., -1., -1., -1., -1., -1., -1., -1., -1., -1., -1., -1., -1.,
-1., -1., -1., -1., -1., -1., -1., -1., -1.])
Dimensions without coordinates: fires
Attributes:
long_name: Fire radiative power computed from SWIR channel (S6)
units: MW
>>> FRP_MWIR = file_xr['FRP_MWIR']
>>> FRP_MWIR
array([ 10.290943, 11.447042, 179.555982, 84.84376 , 48.277547, 9.320155,
17.840467, 38.242334, 18.615514, 18.611452, 14.36118 , 4.440371,
3.06999 , 5.008403, 5.005609, 4.452938, 8.228399, 8.442025,
5.631591, 3.531036, 3.509205, 3.507225, 2.876292])
Dimensions without coordinates: fires
Attributes:
long_name: Fire radiative power computed from MWIR channels (S7 and F1)
units: MW Sunday, August 30, 2020
Python 3.8.5 : Testing with openpyxl - part 002 .
Today I will show you how can use Levenshtein ratio and distance between two strings, see wikipedia.
I used three files created with LibreOffice and save it like xlsx file type.
All of these files come with the column A fill with strings of characters, in this case, numbers.
The script will read all of these files from the folder named xlsx_files and will calculate Levenshtein ratio and distance between the strings of name of these files and column A.
Finally, the result is shown into a graph with matplotlib python package.
Let's see the python script:
I used three files created with LibreOffice and save it like xlsx file type.
All of these files come with the column A fill with strings of characters, in this case, numbers.
The script will read all of these files from the folder named xlsx_files and will calculate Levenshtein ratio and distance between the strings of name of these files and column A.
Finally, the result is shown into a graph with matplotlib python package.
Let's see the python script:
import os
from glob import glob
from openpyxl import load_workbook
import numpy as np
import matplotlib.pyplot as plt
def levenshtein_ratio_and_distance(s, t, ratio_calc = False):
""" levenshtein_ratio_and_distance - distance between two strings.
If ratio_calc = True, the function computes the
levenshtein distance ratio of similarity between two strings
For all i and j, distance[i,j] will contain the Levenshtein
distance between the first i characters of s and the
first j characters of t
"""
# Initialize matrix of zeros
rows = len(s)+1
cols = len(t)+1
distance = np.zeros((rows,cols),dtype = int)
# Populate matrix of zeros with the indeces of each character of both strings
for i in range(1, rows):
for k in range(1,cols):
distance[i][0] = i
distance[0][k] = k
for col in range(1, cols):
for row in range(1, rows):
# check the characters are the same in the two strings in a given position [i,j]
# then the cost is 0
if s[row-1] == t[col-1]:
cost = 0
else:
# calculate distance, then the cost of a substitution is 1.
if ratio_calc == True:
cost = 2
else:
cost = 1
distance[row][col] = min(distance[row-1][col] + 1, # Cost of deletions
distance[row][col-1] + 1, # Cost of insertions
distance[row-1][col-1] + cost) # Cost of substitutions
if ratio_calc == True:
# Ration computation of the Levenshtein Distance Ratio
Ratio = ((len(s)+len(t)) - distance[row][col]) / (len(s)+len(t))
return Ratio
else:
return distance[row][col]
PATH = "/home/mythcat/xlsx_files/"
result = [y for x in os.walk(PATH) for y in glob(os.path.join(x[0], '*.xlsx'))]
result_files = [os.path.join(path, name) for path, subdirs, files in os.walk(PATH) for name in files]
#print(result)
row_0 = []
for r in result:
n = 0
wb = load_workbook(r)
sheets = wb.sheetnames
ws = wb[sheets[n]]
for row in ws.rows:
if (row[0].value) != None :
rows = row[0].value
row_0.append(rows)
print("All rows of column A ")
print(row_0)
files = []
for f in result_files:
ff = str(f).split('/')[-1:][0]
fff = str(ff).split('.xlsx')[0]
files.append(fff)
print(files)
# define tree lists for levenshtein
list1 = []
list2 = []
for l in row_0:
str(l).lower()
for d in files:
Distance = levenshtein_ratio_and_distance(str(l).lower(),str(d).lower())
Ratio = levenshtein_ratio_and_distance(str(l).lower(),str(d).lower(),ratio_calc = True)
list1.append(Distance)
list2.append(Ratio)
print(list1, list2)
# plotting the points
plt.plot(list1,'g*', list2, 'ro' )
plt.show()[mythcat@desk ~]$ python test_xlsx.py
All rows of column A
[11, 2, 113, 4, 1111, 4, 4, 111, 2, 1111, 5, 4, 4, 3, 1111, 1, 2, 1113, 4, 115, 1, 2, 221, 1, 1,
43536, 2, 34242, 3, 1]
['001', '002', '003']
[2, 3, 3, 3, 2, 3, 3, 3, 2, 3, 3, 3, 3, 4, 4, 3, 3, 3, 3, 3, 3, 2, 3, 3, 3, 2, 3, 3, 4, 4, 3, 3,
3, 3, 3, 3, 3, 3, 3, 3, 3, 2, 3, 4, 4, 2, 3, 3, 3, 2, 3, 3, 4, 3, 3, 3, 3, 3, 3, 3, 2, 3, 3, 3,
2, 3, 2, 3, 3, 2, 3, 3, 2, 3, 3, 5, 5, 4, 3, 2, 3, 5, 4, 5, 3, 3, 2, 2, 3, 3] [0.4, 0.0, 0.0, 0.0,
0.5, 0.0, 0.3333333333333333, 0.0, 0.3333333333333333, 0.0, 0.0, 0.0, 0.2857142857142857, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.3333333333333333, 0.0, 0.0, 0.0, 0.5, 0.0, 0.2857142857142857, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.5, 0.2857142857142857, 0.0, 0.0, 0.5,
0.0, 0.0, 0.0, 0.5, 0.0, 0.2857142857142857, 0.0, 0.2857142857142857, 0.0, 0.0, 0.0, 0.3333333333333333,
0.0, 0.0, 0.5, 0.0, 0.0, 0.0, 0.5, 0.0, 0.3333333333333333, 0.3333333333333333, 0.0, 0.5, 0.0, 0.0,
0.5, 0.0, 0.0, 0.0, 0.0, 0.25, 0.0, 0.5, 0.0, 0.0, 0.25, 0.25, 0.0, 0.0, 0.5, 0.5, 0.0, 0.0]Monday, August 24, 2020
Python Qt5 : Get item data from QTreeWidgets.
In this example, I create a tree view with QTreeView with all folders tree.
I add a context_menu with two options.
One option is to get the data from item and is the name of the folder.
The second option is to close the application.
Let's see the source code:

I add a context_menu with two options.
One option is to get the data from item and is the name of the folder.
The second option is to close the application.
Let's see the source code:
import sys
from PyQt5.QtWidgets import QApplication, QFileSystemModel, QDesktopWidget
from PyQt5.QtWidgets import QTreeView, QWidget, QVBoxLayout, QMenu
from PyQt5.QtGui import QIcon
from PyQt5 import QtCore
from PyQt5.QtCore import Qt, QObject
class my_app_tree(QWidget):
def __init__(self):
super().__init__()
self.title = "show files and folders on tree view"
#self.left = 0
#self.top = 0
#self.width = 640
#self.height = 480
self.center()
self.resize(640,480)
self.initUI()
def center(self):
frame_geometry = self.frameGeometry()
center_position = QDesktopWidget().availableGeometry().center()
frame_geometry.moveCenter(center_position)
self.move(frame_geometry.topLeft())
def context_menu(self, position):
menu = QMenu()
copy_action = menu.addAction("Get folder")
quit_action = menu.addAction("Quit")
action = menu.exec_(self.tree.mapToGlobal(position))
# quit application
if action == quit_action:
my_application.quit()
# copy folder name from item
elif action == copy_action:
item = self.tree.selectedIndexes()[0].data()
print("name folder is: "+str(item))
def initUI(self):
self.setWindowTitle(self.title)
#the next source code line is used with left, top, width, height from __init__
#self.setGeometry(self.left, self.top, self.width, self.height)
self.model = QFileSystemModel()
self.model.setRootPath('')
self.tree = QTreeView()
self.tree.setModel(self.model)
self.tree.setAnimated(False)
self.tree.setIndentation(20)
self.tree.setSortingEnabled(True)
self.tree.setWindowTitle("Dir View")
self.tree.resize(640, 480)
windowLayout = QVBoxLayout()
windowLayout.addWidget(self.tree)
self.setLayout(windowLayout)
self.tree.setContextMenuPolicy(Qt.CustomContextMenu)
self.tree.customContextMenuRequested.connect(self.context_menu)
self.show()
if __name__ == '__main__':
my_application = QApplication(sys.argv)
example = my_app_tree()
sys.exit(my_application.exec_())
Sunday, August 23, 2020
Python Qt5 : Add and remove items between two QTreeWidgets.
Today's tutorial will show you how to add and remove items between two QTreeWidgets.
The source code is very simple to understand: the user interface is created with two QTreeWidgets.
One is completed with elements and when the buttons are pressed, the elements are interchanged.
The source code is very simple to understand: the user interface is created with two QTreeWidgets.
One is completed with elements and when the buttons are pressed, the elements are interchanged.
import sys
from PyQt5.QtWidgets import QApplication, QWidget, QDesktopWidget, QPushButton
from PyQt5.QtWidgets import QBoxLayout,QTreeWidget,QTreeWidgetItem
class my_app_class(QWidget):
def __init__(self):
super().__init__()
self.add_button=QPushButton('Add item here')
self.remove_button=QPushButton('Remove item')
self.wishlist=QTreeWidget(self)
self.tree_list=QTreeWidget(self)
# init the UI
self.initUI()
def initUI(self):
# set title of window
self.setWindowTitle('add and remove items from QTreeWidget!')
self.init_tree()
self.resize(800, 480)
self.center()
self.show()
def center(self):
geometry_frame = self.frameGeometry()
center_pos = QDesktopWidget().availableGeometry().center()
geometry_frame.moveCenter(center_pos)
self.move(geometry_frame.topLeft())
def init_tree(self):
headers = ['A','B','C','D']
self.tree_list.setColumnCount(len(headers))
self.tree_list.setHeaderLabels(headers)
self.wishlist.setColumnCount(len(headers))
self.wishlist.setHeaderLabels(headers)
list_layout = QBoxLayout(QBoxLayout.LeftToRight)
list_layout.addWidget(self.tree_list)
list_layout.addWidget(self.wishlist)
tree_root = QTreeWidget.invisibleRootItem(self.tree_list)
# add data to QTreeWidget with QTreeWidgetItem
my_data = ['1','2','3','4']
item = QTreeWidgetItem()
for idx, data in enumerate(my_data):
item.setText(idx, data)
tree_root.addChild(item)
my_data = ['11','10','01','D']
item = QTreeWidgetItem()
for idx, data in enumerate(my_data):
item.setText(idx, data)
tree_root.addChild(item)
my_data = ['s', 'c', 'c', 'c']
item = QTreeWidgetItem()
for idx, data in enumerate(my_data):
item.setText(idx, data)
tree_root.addChild(item)
btn_layout = QBoxLayout(QBoxLayout.RightToLeft)
btn_layout.addWidget(self.add_button)
btn_layout.addWidget(self.remove_button)
main_layout = QBoxLayout(QBoxLayout.TopToBottom)
main_layout.addLayout(list_layout)
main_layout.addLayout(btn_layout)
self.add_button.clicked.connect(self.move_item)
self.remove_button.clicked.connect(self.move_item)
self.setLayout(main_layout)
return main_layout
def move_item(self):
sender = self.sender()
if self.add_button == sender:
source = self.tree_list
target = self.wishlist
else:
source = self.wishlist
target = self.tree_list
item = QTreeWidget.invisibleRootItem(source).takeChild(source.currentIndex().row())
QTreeWidget.invisibleRootItem(target).addChild(item)
if __name__=='__main__':
# start the QApplication
my_application = QApplication(sys.argv)
# create aplication with the class
example = my_app_class()
# use exit for QApplication
sys.exit(my_application.exec_())
Subscribe to:
Comments (Atom)