However, you can download the player as a 3D object and use it as an avatar.
Here's an issue: The 3D object is hard to set with origins for animation but python and Blender 3D can easily solve this.
You can use BMesh.
As you know:
BMesh is the new Blender mesh system in 2.63, with full support for N-sided polygons instead of only triangles and quads.
The result of this download 3D object has a bad origin:
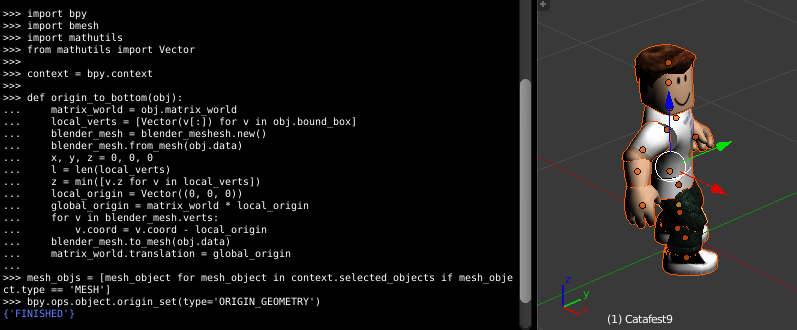
Let's see the source code:
import bpy
import bmesh
import mathutils
from mathutils import Vector
context = bpy.context
def origin_to_bottom(obj):
matrix_world = obj.matrix_world
local_verts = [Vector(v[:]) for v in obj.bound_box]
blender_mesh = blender_meshesh.new()
blender_mesh.from_mesh(obj.data)
x, y, z = 0, 0, 0
l = len(local_verts)
z = min([v.z for v in local_verts])
local_origin = Vector((0, 0, 0))
global_origin = matrix_world * local_origin
for v in blender_mesh.verts:
v.coord = v.coord - local_origin
blender_mesh.to_mesh(obj.data)
matrix_world.translation = global_origin
mesh_objs = [mesh_object for mesh_object in context.selected_objects if mesh_object.type == 'MESH']
bpy.ops.object.origin_set(type='ORIGIN_GEOMETRY')
for my_objects in mesh_objs:
origin_to_bottom(my_objects)