Fist I install OpenCV python module and I try using with Fedora 25.
I used python 2.7 version.
[root@localhost mythcat]# dnf install opencv-python.x86_64
Last metadata expiration check: 0:21:12 ago on Sat Feb 25 23:26:59 2017.
Dependencies resolved.
================================================================================
Package Arch Version Repository Size
================================================================================
Installing:
opencv x86_64 3.1.0-8.fc25 fedora 1.8 M
opencv-python x86_64 3.1.0-8.fc25 fedora 376 k
python2-nose noarch 1.3.7-11.fc25 updates 266 k
python2-numpy x86_64 1:1.11.2-1.fc25 fedora 3.2 M
Transaction Summary
================================================================================
Install 4 Packages
Total download size: 5.6 M
Installed size: 29 M
Is this ok [y/N]: y
Downloading Packages:
(1/4): opencv-python-3.1.0-8.fc25.x86_64.rpm 855 kB/s | 376 kB 00:00
(2/4): opencv-3.1.0-8.fc25.x86_64.rpm 1.9 MB/s | 1.8 MB 00:00
(3/4): python2-nose-1.3.7-11.fc25.noarch.rpm 543 kB/s | 266 kB 00:00
(4/4): python2-numpy-1.11.2-1.fc25.x86_64.rpm 2.8 MB/s | 3.2 MB 00:01
--------------------------------------------------------------------------------
Total 1.8 MB/s | 5.6 MB 00:03
Running transaction check
Transaction check succeeded.
Running transaction test
Transaction test succeeded.
Running transaction
Installing : python2-nose-1.3.7-11.fc25.noarch 1/4
Installing : python2-numpy-1:1.11.2-1.fc25.x86_64 2/4
Installing : opencv-3.1.0-8.fc25.x86_64 3/4
Installing : opencv-python-3.1.0-8.fc25.x86_64 4/4
Verifying : opencv-python-3.1.0-8.fc25.x86_64 1/4
Verifying : opencv-3.1.0-8.fc25.x86_64 2/4
Verifying : python2-numpy-1:1.11.2-1.fc25.x86_64 3/4
Verifying : python2-nose-1.3.7-11.fc25.noarch 4/4
Installed:
opencv.x86_64 3.1.0-8.fc25 opencv-python.x86_64 3.1.0-8.fc25
python2-nose.noarch 1.3.7-11.fc25 python2-numpy.x86_64 1:1.11.2-1.fc25
Complete!
[root@localhost mythcat]#
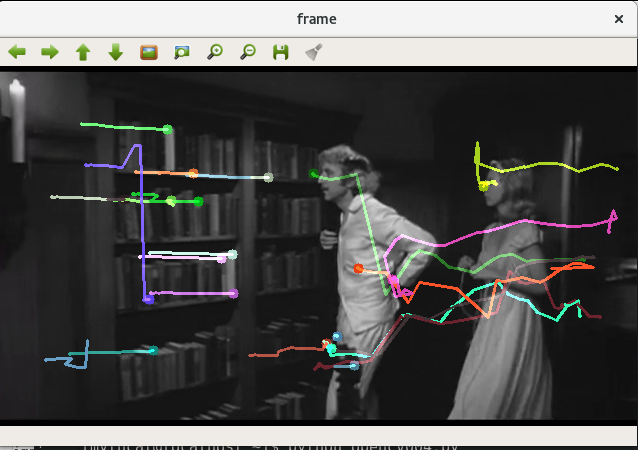
This is my test script with opencv to detect flow using Lucas-Kanade Optical Flow function.
This tracks some points in a black and white video.
First you need:
- one black and white video;
- not mp4 file type file;
- the color args need to be under 4 ( see is 3);
- I used this
video:
I used cv2.goodFeaturesToTrack().
We take the first frame, detect some Shi-Tomasi corner points in it, then we iteratively track those points using Lucas-Kanade optical flow.
The function cv2.calcOpticalFlowPyrLK() we pass the previous frame, previous points and next frame.
The returns next points along with some status numbers which has a value of 1 if next point is found, else zero.
That iteratively pass these next points as previous points in next step.
See the code below:
import numpy as np
import cv2
cap = cv2.VideoCapture('candle')
# params for ShiTomasi corner detection
feature_params = dict( maxCorners = 77,
qualityLevel = 0.3,
minDistance = 7,
blockSize = 7 )
# Parameters for lucas kanade optical flow
lk_params = dict( winSize = (17,17),
maxLevel = 1,
criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
# Create some random colors
color = np.random.randint(0,255,(100,3))
# Take first frame and find corners in it
ret, old_frame = cap.read()
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
p0 = cv2.goodFeaturesToTrack(old_gray, mask = None, **feature_params)
# Create a mask image for drawing purposes
mask = np.zeros_like(old_frame)
while(1):
ret,frame = cap.read()
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# calculate optical flow
p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)
# Select good points
good_new = p1[st==1]
good_old = p0[st==1]
# draw the tracks
for i,(new,old) in enumerate(zip(good_new,good_old)):
a,b = new.ravel()
c,d = old.ravel()
mask = cv2.line(mask, (a,b),(c,d), color[i].tolist(), 2)
frame = cv2.circle(frame,(a,b),5,color[i].tolist(),-1)
img = cv2.add(frame,mask)
cv2.imshow('frame',img)
k = cv2.waitKey(30) & 0xff
if k == 27:
break
# Now update the previous frame and previous points
old_gray = frame_gray.copy()
p0 = good_new.reshape(-1,1,2)
cv2.destroyAllWindows()
cap.release()
The output of this file is: